 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTether-Aware Dynamic Collision Avoidance for USV-HROV Systems
May 31, 2026Heterogeneous marine robotic systems composed of an unmanned surface vehicle (USV) and a hybrid remotely operated vehicle (HROV) have shown great potential for subsea cable inspection. In such missions, the USV tracks the HROV at the surface while supplying power and communication through an umbilical tether. However, dynamic collision avoidance for the USV during HROV tracking is challenging because the submerged tether may scrape against passing vessels, while evasive maneuvers can enlarge the USV--HROV separation, thereby increasing the likelihood of tether tautness and compromising HROV operations. To address these challenges, this work proposes a tether-aware dynamic collision avoidance method for a USV tracking an HROV. First, a tether safety-aware planar domain is introduced to represent the three-dimensional collision risk between the tether and obstacle vessels without an explicit tether shape model. Second, a tether tautness-aware velocity obstacle method is developed to achieve safe avoidance while reducing the likelihood of tether tautness. Finally, the method is integrated with line-of-sight guidance to coordinate HROV tracking and collision avoidance. Gazebo-based simulations show that the proposed method avoids dynamic obstacle vessels while maintaining tether safety and reducing the likelihood of tether tautness during USV evasive maneuvers.
FAR-AVIO: Fast and Robust Schur-Complement Based Acoustic-Visual-Inertial Fusion Odometry with Sensor Calibration
Dec 23, 2025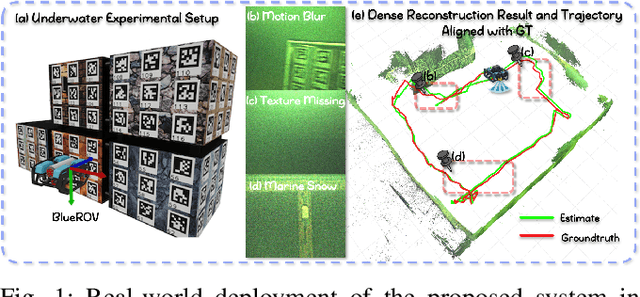
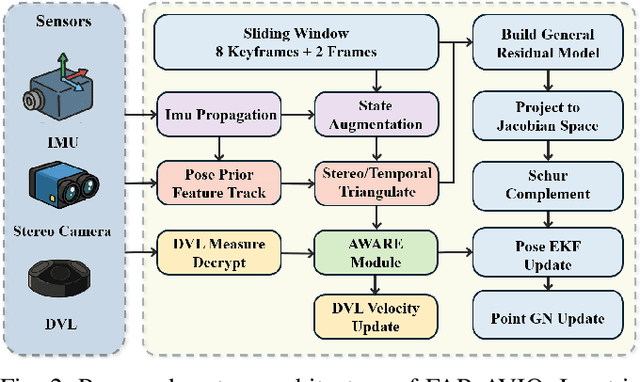
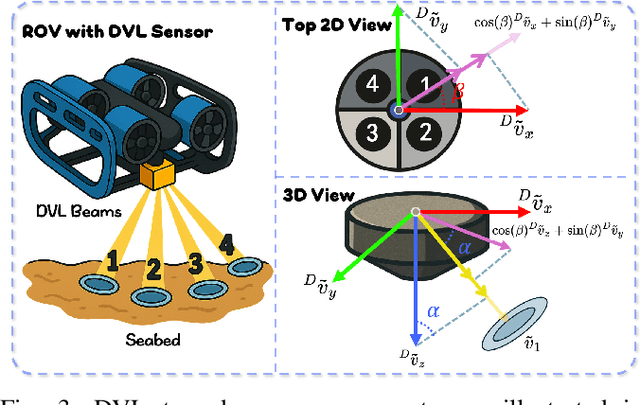
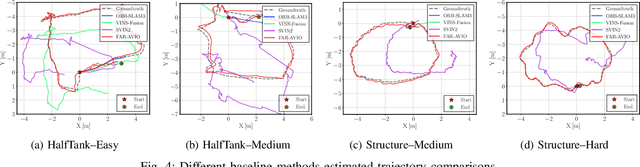
Underwater environments impose severe challenges to visual-inertial odometry systems, as strong light attenuation, marine snow and turbidity, together with weakly exciting motions, degrade inertial observability and cause frequent tracking failures over long-term operation. While tightly coupled acoustic-visual-inertial fusion, typically implemented through an acoustic Doppler Velocity Log (DVL) integrated with visual-inertial measurements, can provide accurate state estimation, the associated graph-based optimization is often computationally prohibitive for real-time deployment on resource-constrained platforms. Here we present FAR-AVIO, a Schur-Complement based, tightly coupled acoustic-visual-inertial odometry framework tailored for underwater robots. FAR-AVIO embeds a Schur complement formulation into an Extended Kalman Filter(EKF), enabling joint pose-landmark optimization for accuracy while maintaining constant-time updates by efficiently marginalizing landmark states. On top of this backbone, we introduce Adaptive Weight Adjustment and Reliability Evaluation(AWARE), an online sensor health module that continuously assesses the reliability of visual, inertial and DVL measurements and adaptively regulates their sigma weights, and we develop an efficient online calibration scheme that jointly estimates DVL-IMU extrinsics, without dedicated calibration manoeuvres. Numerical simulations and real-world underwater experiments consistently show that FAR-AVIO outperforms state-of-the-art underwater SLAM baselines in both localization accuracy and computational efficiency, enabling robust operation on low-power embedded platforms. Our implementation has been released as open source software at https://far-vido.gitbook.io/far-vido-docs.